Inverse Perspective Mapping (IPM)
Inverse Perspective Mapping (IPM) is the process of converting 2D points from images into 3D points without using depth information, by assuming the points lie on an arbitrary plane.
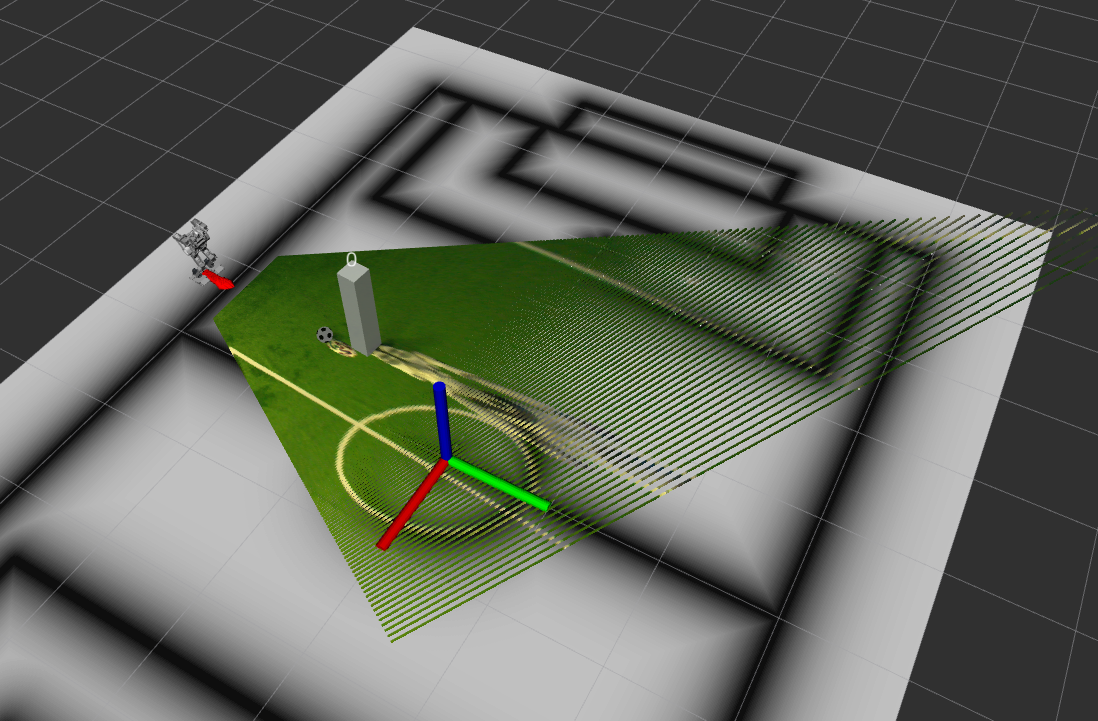
IPM applied to project the camera image as well as some detected objects onto the ground plane in a soccer robot scenario.
This package provides a general implementation of inverse perspective mapping for ROS. For a downstream package that uses this package to project balls etc. for soccer playing robots, see Soccer IPM.
The project is hosted on Github by ROS Sports. Issues and Pull Requests are welcome!
To get started look at the Tutorial.